2ESO – SA2 – Robótica






Herramienta web MindMup

MOVIMIENTO
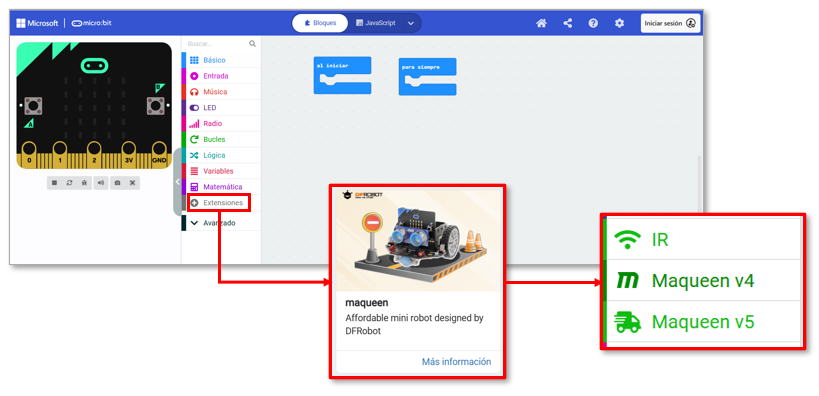
Entre los bloques de la extensión para maqueen el que permite el movimiento es el bloque motor. Este bloque nos permite decidir qué motor mover, si avanzar o retroceder y la velocidad con la que se debe producir el movimiento.
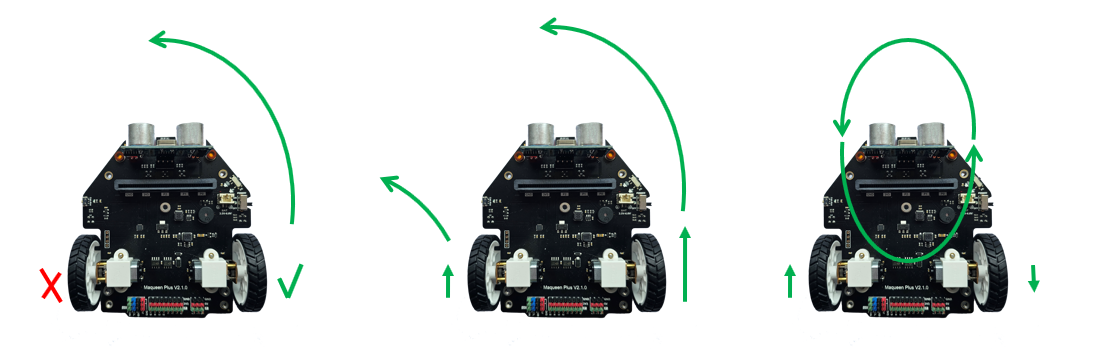
 El bloque parar motor puede usarse para que el robot realice un giro.
El bloque parar motor puede usarse para que el robot realice un giro.
Recuerda:
Actividades
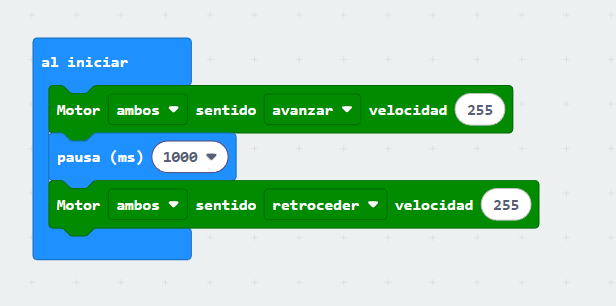
- Haz que tu robot Maqueen se mueva hacia adelante durante 1 segundos, se pare durante 1 segundos y retroceda durante 1 segundos marcha atrás, llegando a la posición de inicio.
- Haz que el robot Maqueen avance durante 3 segundos, de un giro de 180 grados, avance 3 segundos y vuelva a girar 180 grados, para terminar en el punto de partida, pero girado 180º.
RETO
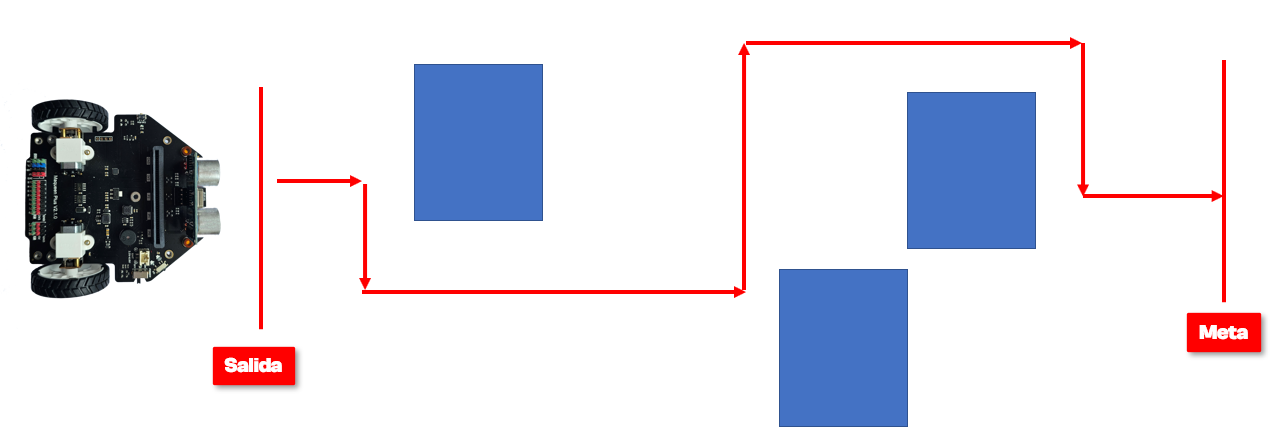
Haz que tu robot siga la trayectoria que se indica
LUCES
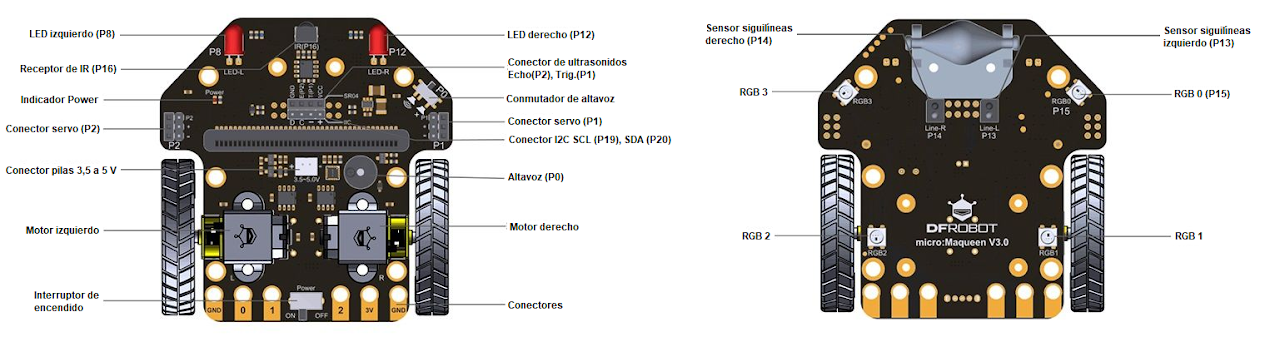
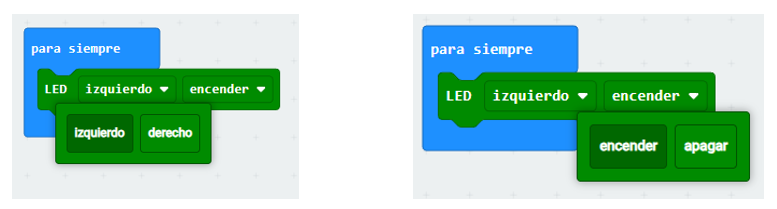
Podemos encender los LEDs rojo que tiene el maqueen en la parte delantera utilizando el bloque LED. En este bloque se puede escoger entre el LED derecho o izquierdo y la opción de apagar o encender.
Actividad
Realiza un programa que encienda los LEDs izquierdo y derecho de manera alternativa durante medio segundo cada uno por siempre.
ENCENDIENDO LOS LEDS RGB
Maqueen dispone de 4 LEDs RGB que pueden mostrar hasta 16 millones de colores diferentes. Se encuentran en la parte inferior, son pequeños rectángulos blancos conectados a la patilla P15, será esta la que debamos configurar y tener en cuenta.
Cada uno de estos LEDs tiene 3 LEDs más pequeñitos con los colores Rojo, Verde y Azul. Dependiendo de la intensidad que se de a cada uno el color que proyecte el LED será uno u otro. Cada LED tiene 255 niveles de luminosidad.
Para poder programar estos LEDs necesitamos una nueva extensión, NEOPIXEL.
![]()
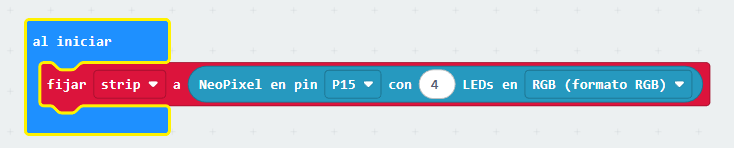
Lo primero que tenemos que hacer es indicar que los 4 LEDs se encuentran conectados a P15, es por ello que al iniciar siempre tendremos que poner algo similar a lo siguiente:
Con el siguiente bloque se puede establecer el color de cada LED
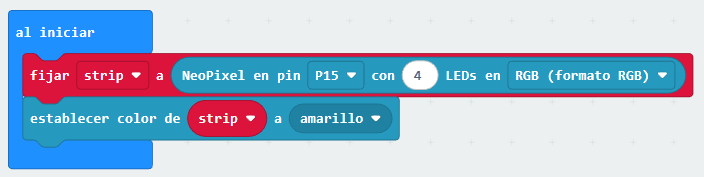
Con este código acabamos de indicar que los 4 LEDs se vean en color amarillo.
Actividad
Haz que el robot avance durante 2 segundos mientras muestra la luz verde. Una vez se pare, debe girar 90 grados a la izquierda encendiendo el LED izquierdo. A partir de ahí avanza 2 segundo mostrando una luz amarilla. Al parar gira 90 grados a la derecha encendiendo el LED derecho. Avanza un segundo más mostrando una luz roja.
RETO
Haz que el robot se marque un pequeño paso de baile mostrando luces de colores y música.
SENSORES
Anteriormente, en el tema de IoT, ya veíamos los sensores y configurábamos nuestra placa micro:bit para hacer uso de ellos. Con Maqueen también podemos utilizar sensores para detectar objetos, cantidad de luz, etc., y realizar una acción u otra en función de lo que estos perciben.
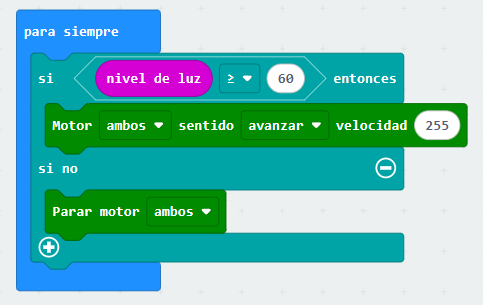
Ejemplo de uso del sensor de luz
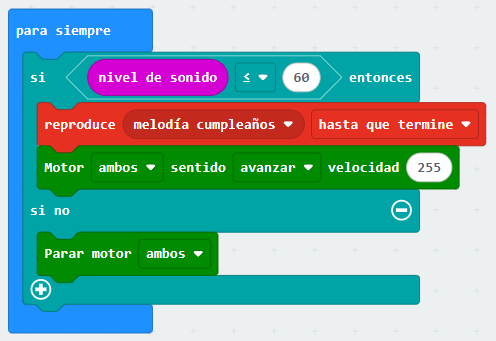
Ejemplo de uso del sensor de sonido
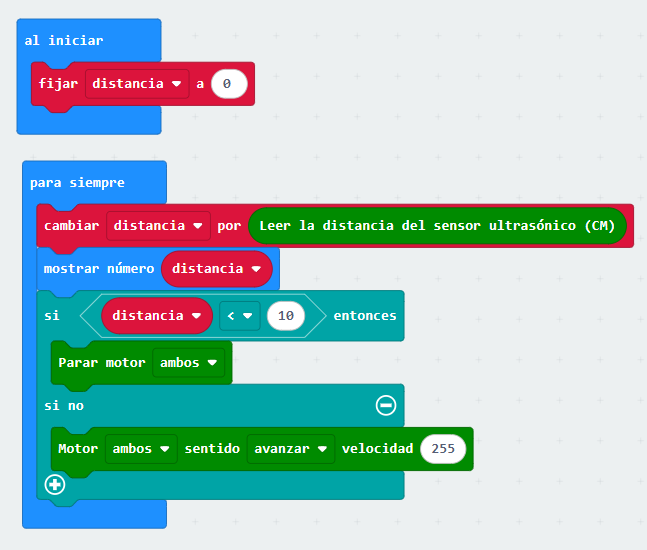
Sensor de ultrasonido
El sensor de ultrasonido es el que permite la detección de objetos por parte de Maqueen. El robot tiene este sensor ubicado en la parte frontal, permitiendo calcular la distancia a un objeto en centímetros con buena precisión. Su funcionamiento se basa en la emisión de una onda ultrasónica y en la medición del tiempo que tarda en rebotar y regresar, de forma similar a la ecolocalización que utilizan los murciélagos. Para ello, uno de los sensores se encarga de emitir la señal ultrasónica, mientras que el otro recibe el eco de dicha señal.
RETO
Haz que tu robot se mueva de manera ininterrumpida de forma que, si encuentra un obstáculo lo sortee girando de manera aleatoria a izquierda o derecha. El robot comienza en una posición y debe finalizar en otra indicada por el profesor. En el trayecto, cuando encuentra un obstáculo, debe mostrar las luces inferiores en color rojo, al girar estas cambian a verde y al mover normalmente se ven amarillas.
SEGUIR LÍNEAS
Nuestro robot maqueen tiene en la parte inferior dos sensores de infrarrojos que detectan si se encuentra sobre una zona clara u oscura de manera que nos permite seguir líneas.
El bloque que usaremos de la extensión de maqueen es:

Veamos el siguiente código. Pruébalo para ver que funciona.

RETO
Haz que tu robot siga las líneas que muestran el circuito que ponga la profesora. Ten en cuenta posibles obstáculos y usa las luces LED para hacerlo más divertido.
